OpenArm
Built the hardware behind OpenArm 01. Total BOM cost ~$6500. Nominal Payload 4.1kg, Peak Payload 6.0kg. Arm weight 5.5kg. Visit: https://openarm.dev/
Built the hardware behind OpenArm 01. Total BOM cost ~$6500. Nominal Payload 4.1kg, Peak Payload 6.0kg. Arm weight 5.5kg. Visit: https://openarm.dev/
Designed and fabricated the end-effector for a teleoperated bartender capable of handling fragile and glassware.
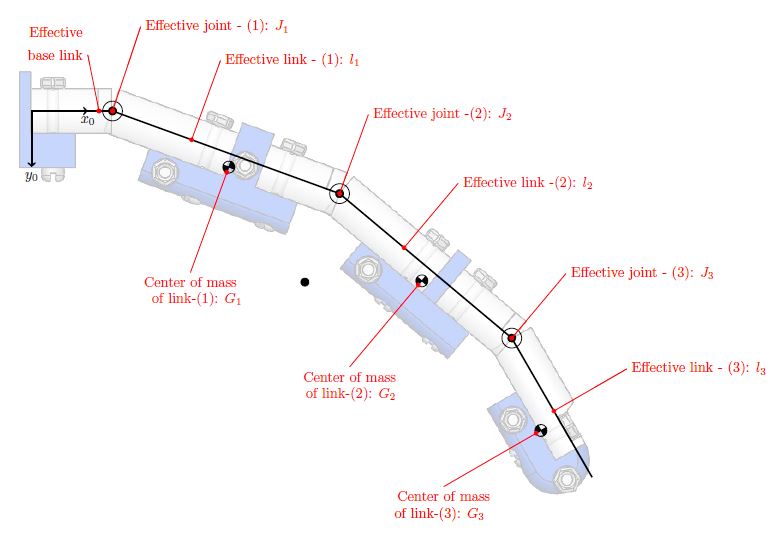
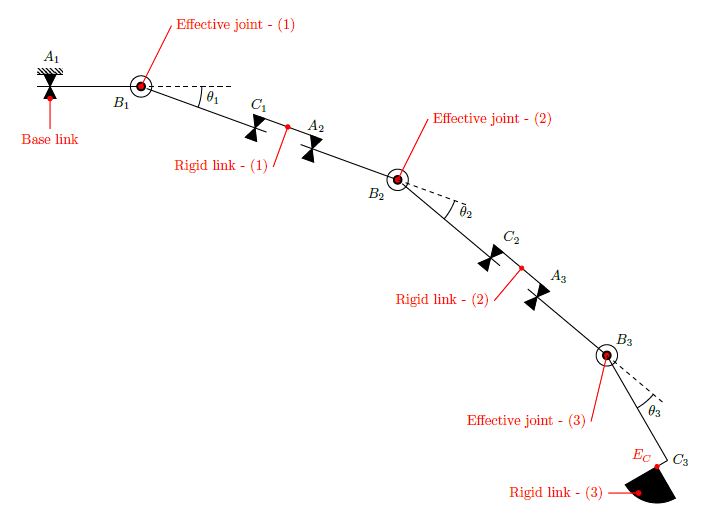
Built the first prototype for a liver biopsy robot using 3D printing, hydrostatic actuators, and non-magnetic materials as a part of Mechatronics and Controls Lab, UCLA.
CAD demo of robot inside MRI chamber
Prototype testing
Built a test rig to analyze linearity and force-position characteristics of hydrostatic actuators used for haptic teleoperation.
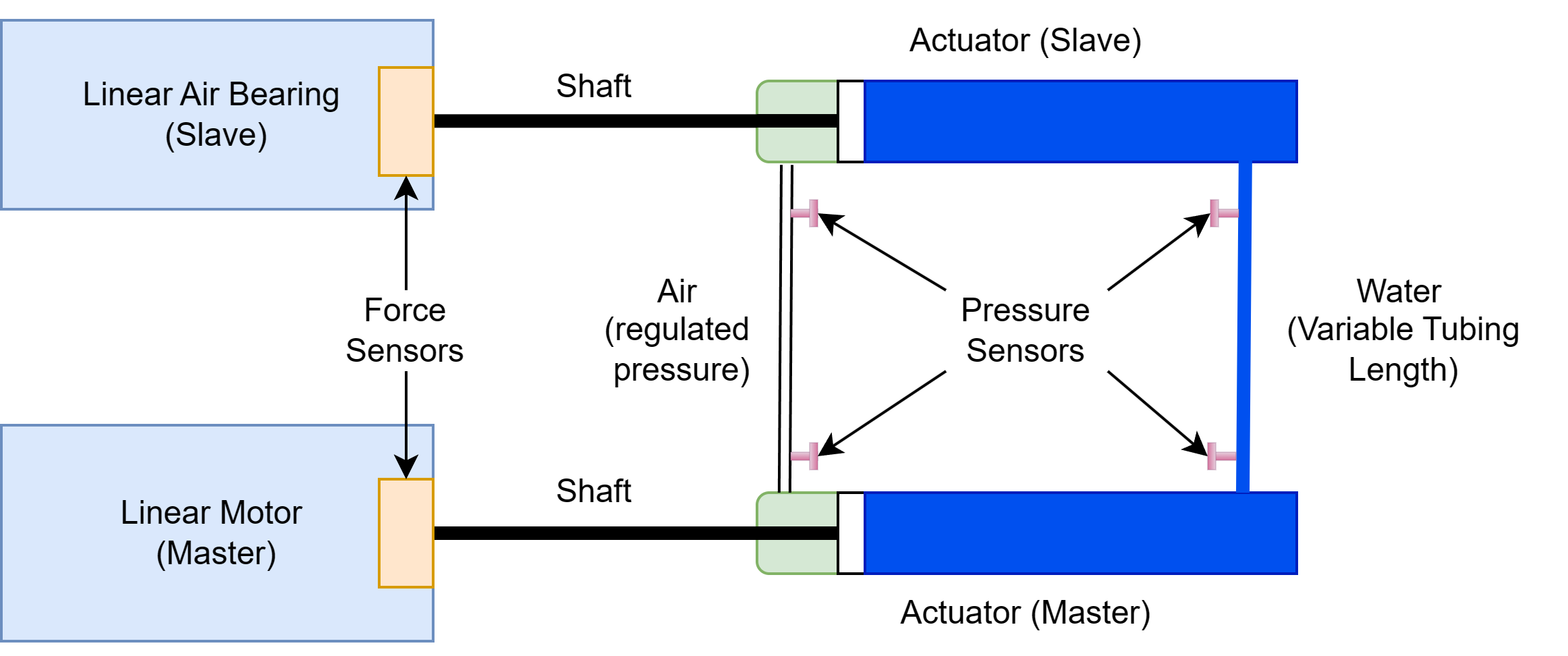
System Schematic
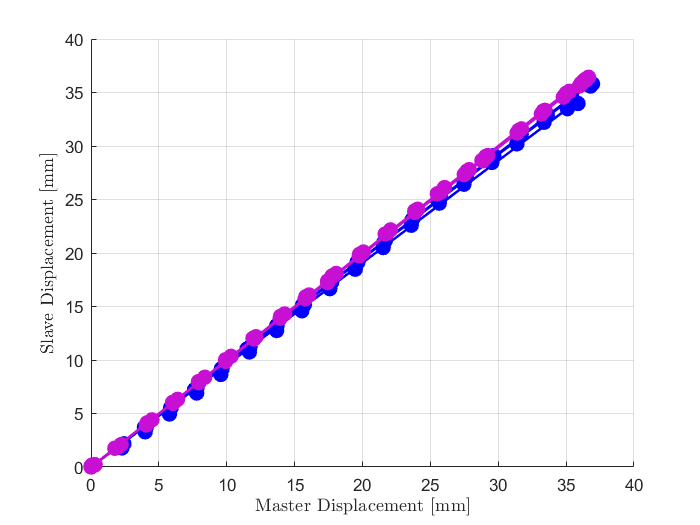
Position Control Data
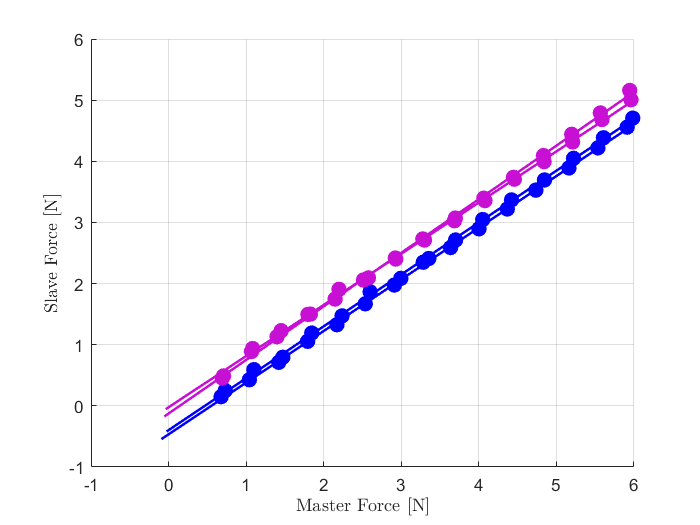
Force Control Data
Built a breathing phantom using air blowers and MR-visible liver to simulate human motion inside an MRI scanner.
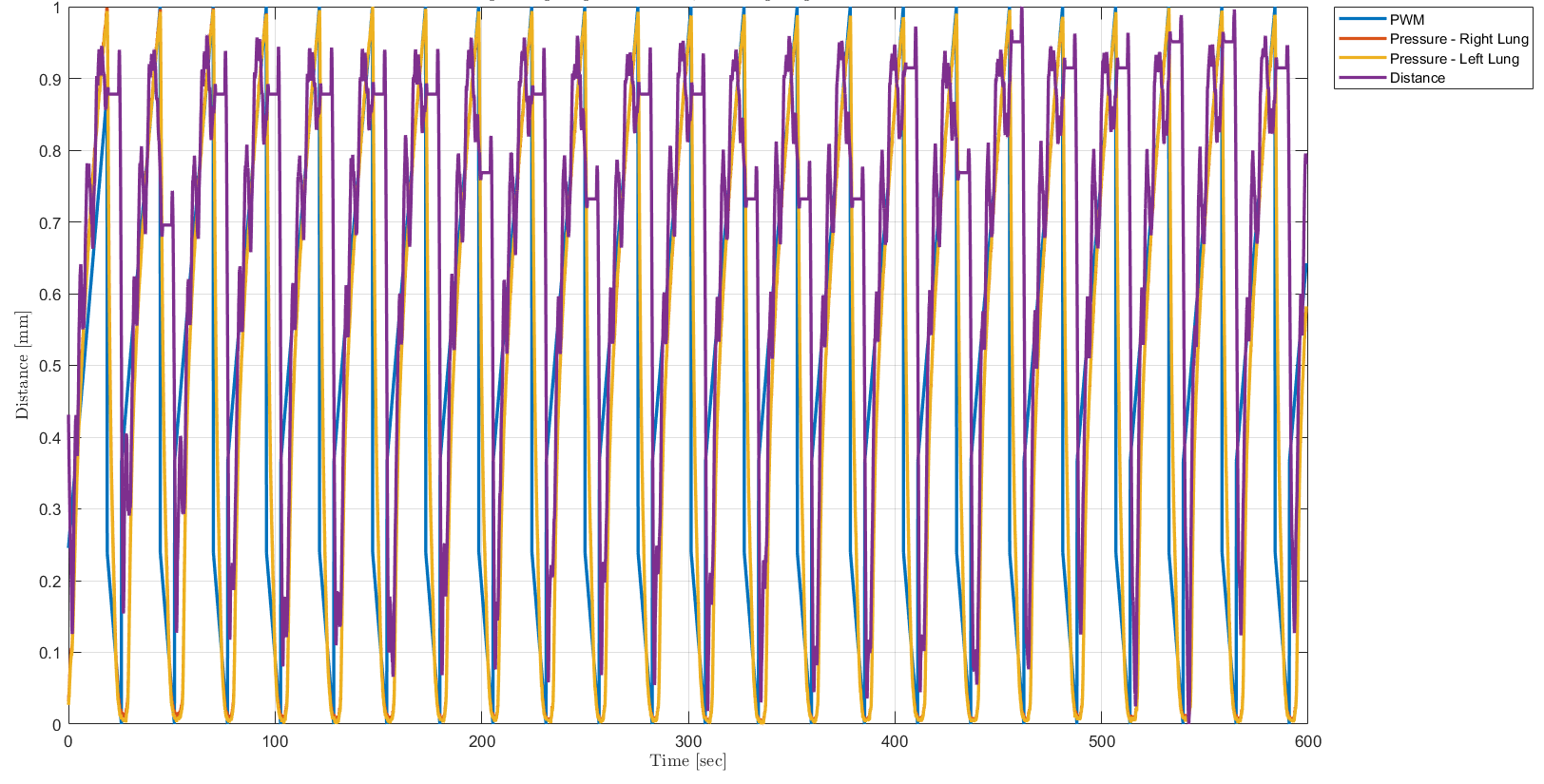
Open-loop actuation test results
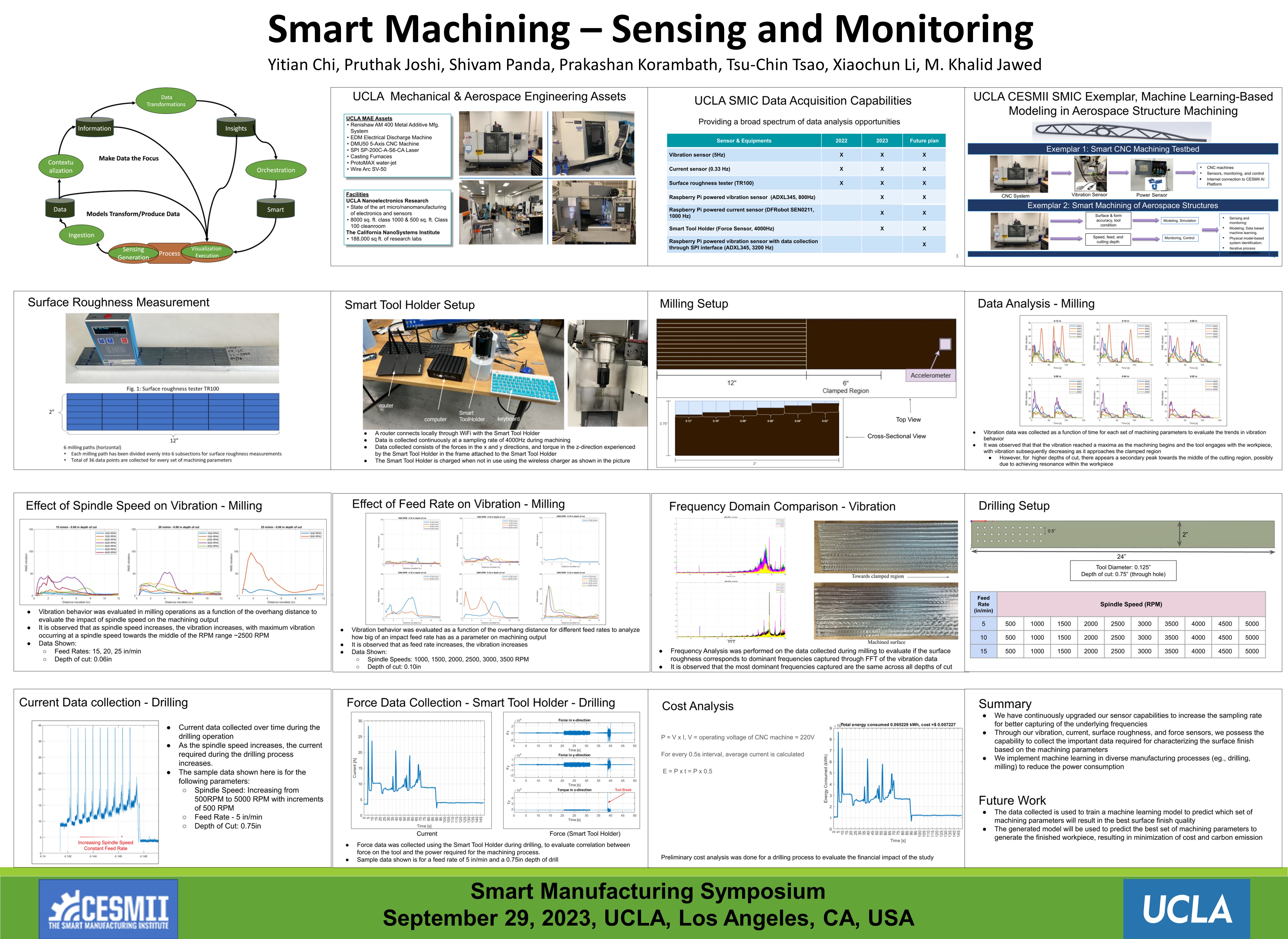
Instrumented a CNC machine with sensors to collect data during drilling/milling. Data used to explore predictive maintenance and process diagnostics.
Evaluated two soft finger designs using CV tracking and kinematic simulations.